 2026-01-22
2026-01-22
 分享至:
分享至:
近日,人工智能学院、机器人与智能系统研究院陈禹含助理教授在机器人运动学基础理论研究方面取得重要进展,提出了一种基于指数积公式的五阶收方法,将机器人运动学参数辨识与逆运动学统一在同一数学框架下,显著提升了计算效率与鲁棒性。研究成果以“A Fifth-Order POE-Based Method for Kinematic Identification and Inverse Kinematics of Serial Robots”(基于POE公式的串联机器人运动学辨识与逆解五阶收敛方法)为题,被国际权威期刊IEEE Transactions on Robotics(T-RO)录用发表。
运动学参数辨识与逆运动学是实现机器人高精度运动控制的基石。长期以来,工业界和学术界多采用牛顿-拉夫逊等二阶或三阶数值迭代方法求解。然而,在面对高精度装配、焊接等复杂工况时,现有方法往往面临收敛速度慢、计算精度受限以及在奇异点附近鲁棒性差等挑战。如何建立统一、高效且鲁棒的求解框架,是机器人学领域亟待解决的关键问题。
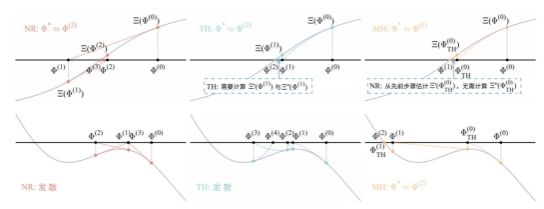
陈禹含基于李群李代数理论与指数积公式,创新性地提出了一种用于运动学辨识和逆运动学求解的改进哈雷迭代法。该方法通过引入海森矩阵的曲率信息,从数学上严格证明了该方法具有五阶收敛特性。相比传统的二阶或三阶方法,该方法能以更少的迭代次数达到极高的计算精度。该研究建立了一个通用的运动学误差模型,将参数辨识与逆运动学求解转化为统一的求根问题,极大地简化了算法计算的复杂度。针对奇异位形问题,该成果进一步提出了阻尼改进哈雷方法,有效解决了矩阵奇异导致的计算发散问题,显著提升了算法在极端条件下的稳定性。
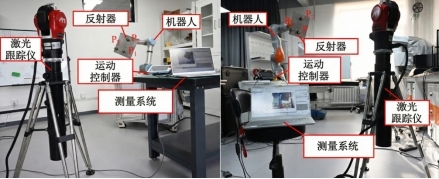
该方法已在SCARA、UR5、KUKA LBR IIWA、FANUC M-710iC等多款工业机器人与协作机器人上完成了仿真与实物验证。实验结果表明,该方法在保证计算效率的同时,显著提升了机器人的绝对定位精度。此外,团队已将核心算法代码(MATLAB/C++)完全开源,为机器人学界和产业界提供了重要的基础工具。
IEEE Transactions on Robotics(T-RO)是IEEE机器人与自动化学会的旗舰期刊,也是国际机器人学领域公认的最具权威性和影响力的顶级学术期刊之一,代表了当前机器人学研究的最高水平。
开源代码链接:https://github.com/fengyu1993/DMH
论文链接:https://ieeexplore.ieee.org/document/11353083
来源:人工智能学院 机器人与智能系统研究院
编辑:于舒雯
 最新动态
最新动态
 投稿入口
投稿入口
 使用说明
使用说明